Mess-, Steuer- und Regelungstechnik
Zunächst wollen wir die Begriffe deffinieren. In der MSR-Technik stecken eigentlich 3 Begriffe, die wir unterscheiden.
Die Mess-Technik beschreibt, dass wir Physikalisch Zustände erfassen und erkennbar machen. Mehr eigentlich nicht. Aber das ist eine entschidende Voraussetzung um Einfluss auf die Physikalisch Größe zu haben. In der Haustechnik sind die häufigsten Messgrößen, die Temperatur (in °C oder °K), Die Feuchte (in % oder g/kg Luft), der Druck (in Bar, Pascal oder Atmosphärendruck) und die Enthalpie, Energieinhalt (in kJ/kg Luft).
Die Steuerungs-Technik sagt eigentlich schon aus, dass etwas (An-)gesteuert wird. Es wird also ein Einfluss auf etwas genommen, mit der Absicht eine bestimte Wirkung zu erzielen. Mehr eigentlich nicht. Es wird also nicht überprüft, ob die Wirkung einsetzt und schon gar nicht in welcher Weise diese erfolgt. Im Prinzip ist die Steuerung ein "Blindflug". Hier werden allenfalls Erfahrungswerte oder theoretische Berechnungen der Wirkung angesetzt, aber nicht das was tatsächlich passiert.
Die Regelungs-Technik geht hier einen entscheidenden Schritt weiter. Hier wird der tatsächliche Wert erfasst, ausgewertet und die Maßnahme ergriffen, die dann dem Problem entgegenwirkt. Dieser Vorgang wird eigentlich kontinuierlich gemacht, solange die Regelung aktiv ist. Die Regelung ist also ein Eingriff in einen Zuzstand der auf die Änderung des Zustandes reagiert. Eine Regelung kann daher auf eine Veränderung reagieren, gleichgültig welcher Ursache vorliegt. Der entschidende Faktor ist hierbei der Sollwert. Es ist der Wert, der erreicht werden soll. Daher muß die Regelung immer einen Vergleich zwischen Sollwert und Istwert machen und je nach Physikalischer Funktion eingreifen. Da diese Funktion andauernd erfolgt und immer eine Rückwirkung auf die zu regelnde Eigenschaft erfolgt ist das ein andauernder Kreislauf. Man spricht daher auch von einem Regelkreis.
In einem Video-Clip wird hier die Funktion anschaulich und ohne technischen oder mathematischen Ballast erklärt.
ich möchte ausdrücklich darauf hinwiesen, dass dieser Clip nicht von mir stammt, sondern aus anderen Quellen. Er verdeutlicht die Funktion aber sehr anschaulich an einigen Beispielen, nicht nur in der Haustechnik, sondern ganz allgemein.
Hier der Link --> www.youtube.com/watch?v=FDIchWfZL28
Der Regler
 Der Regler besteht aus einer Funktion, die durch mehrere Parameter beschrieben wird. Die wichtigsten sind:
Der Regler besteht aus einer Funktion, die durch mehrere Parameter beschrieben wird. Die wichtigsten sind:
Istwert X, das ist der Wert, den wir mit der Regelung eigentlich beeinflussen wollen, also das Ziel, oder auch Regelgröße genannt. Dieser physikalische Wert wird dem Regler als Istwert zugeführt.
Sollwert W, das ist der Wert, auf den der Istwert hingeführt werden soll, auch Führungsgröße genannt.
Aus der Differenz zwischen Sollwert und Istwert berechnet der Vergleicher (ein Teil des Reglers) intern die Reglerabweichung (E). Das ist der Wert, um den der Istwert vom Sollwert abweicht. Dieser wird aus dem Unterschied, zwischen Sollwert und Istwert gebildet und ist eine einfache Subtraktion (Minus-Rechnung), Reglerabweichung (E) = Sollwert (W) - Istwert (X) ( Aus der Reglerabweichung bildet dann der Regler, auf Grund seiner Eigenschaft, die Regelgröße. Dies ist die eigentliche Regelberechnung. Da die Regelabweichung (E) nur ein Regler-interner Wert ist, kommt er ausserhalb des Reglers nicht mehr vor.
Stellgröße Y, ist derjenige Wert den der Regler aus seiner Regelgröße als physikalischen Wert ausgiebt.
Hilfsgrößen H, Sind eigenlich nur Hilfsmittel, um die Regeler-Berechnung zu beeinflussen. Diese können unterschiedlicher Natur sein. Z.B. eine Zeitsteuerung (Schaltuhr) die den Regler ein- und auschaltet, oder den Sollwert verändert. Es können auch andere Eigenschaften (Parameter) des Regler beeinflußt werden, die in die Reglerberechnung eingehen.
Es gibt Regler mit unterschiedlichen Eigenschaften. Diese Eigenschaften beschreiben das Verhalten des Reglers, sowohl in der Intensität (Stärke), als auch im Zeitverhalten.
Alle Regler-Typen haben aber immer die Regelabweichung, also die Differenz zwischen Soll- und Istwert als Basis für die Berechnung.
Betrachten wir zunächst mal die einzelnen Regler-Typen.
 Der P-Regler, ist der einfachte Regler-Typ, auch Proportional-Regler genannt. Dieser Reglertyp berechnet die Regelgröße (und damit den Stellausgang) als einfachen Faktor, also die Multiplikation von Reglerabweichung mal Verstärkungsfaktor. Dies stell hier die Regelberechnung dar.
Der P-Regler, ist der einfachte Regler-Typ, auch Proportional-Regler genannt. Dieser Reglertyp berechnet die Regelgröße (und damit den Stellausgang) als einfachen Faktor, also die Multiplikation von Reglerabweichung mal Verstärkungsfaktor. Dies stell hier die Regelberechnung dar.
Y = (W-X) * P-Anteil
In der Sprungantwort zum Zeitpunkt t(0) kann man erkennen, dass der Stellwert direkt proportonal der Reglerabweichung ist. Eine kleine Reglerabweichung (der Differenz zwischen gewünschtem Sollwert und tatsächlichem Istwert) ergibt einen deffinierten Stellwert. Bei konstanter Reglerabweichung, bleibt der Stellwert ebenfals konstant. Man kann den Stellwert auch als lineare Komponente zur Reglerabweichung darstellen. Die Steilheit dieser Geraden, der P-Anteil (Verstärkung) bleibt konstant.
 Der I-Regler. ist ein ganz anderer Regler-Typ, auch Integal-Regler genannt.
Der I-Regler. ist ein ganz anderer Regler-Typ, auch Integal-Regler genannt.
Der Soll- Istwert Vergleich findet auch hier genau gleich statt, aber die Reglerfunktion ist nicht eine einfache Multiplikation, sondern bildet einen Faktor, um den die Regelgröße pro Zeiteinheit ansteigt. Der Stellwert beginnt bei Null und steigt kontinuierlich an, solange die Reglerabweichung konstant bleibt. Der Wert würde theoretisch ins Unendliche gehen, wenn die Reglerabweichung nicht zu Null wird oder ins Negative geht. Bei einer negativen Regelabweichung (also wenn der Sollwert kleiner als der Istert ist) geht der Regelberechnung dann wieder zurück, das heist der Stellwert wird wieder mit der Zeit kleiner.
Y = (W-X) * t * I-Anteil
Der Faktor für die Steilheit dieser Kurve hängt immer von der Regeldifferenz ab. Wir haben hier also eine Aufsummierung von Teilabschnitten einer Zeitfunktion. Dies nennt man auch Integral. Daher auch der Name Integral-Regler, oder kurz auch I-Regler genannt. Wenn die Reglerabweichung wieder zu Null wird, summiert das Integral keine Werte mehr auf, die Regelgröße (Stellwert) bleibt unverändert (konstant). Der D-Regler, stellt die 3. Variante eines Reglers dar. Wie bei allen Reglern bildet auch hier die Reglerabweichung die Basis für die Regelfunktion. Nur ist hier nicht der eigentliche Wert der Reglerabweichung entschidend, sondern, wie sich die Reglerabweichung über die Zeit verhält. Also wie schnell sich die Reglerabweichung ändert. Bei einer schnellen Änderung der Reglerabweichung ist die Reglergröße höher als bei einer langsameren Reglerabweichung und zwar sowohl positiv, als auch negativ.
Der D-Regler, stellt die 3. Variante eines Reglers dar. Wie bei allen Reglern bildet auch hier die Reglerabweichung die Basis für die Regelfunktion. Nur ist hier nicht der eigentliche Wert der Reglerabweichung entschidend, sondern, wie sich die Reglerabweichung über die Zeit verhält. Also wie schnell sich die Reglerabweichung ändert. Bei einer schnellen Änderung der Reglerabweichung ist die Reglergröße höher als bei einer langsameren Reglerabweichung und zwar sowohl positiv, als auch negativ.
Y = ![]() (W-X) * t * D-Anteil
(W-X) * t * D-Anteil
Die Höhe der Regelerabweichung selbst spielt also beim D-Regler überhaupt keine Rolle, sondern nur deren Änderung, (Differenz pro Zeiteinheit) also das Differenzial aus der Reglerabweichung. Nach einer Änderung, oder wenn die Reglerabweichung konstant bleibt, ist der Ausgangswert (Stellwert) = Null.
D-Regler haben daher die Eigenschaft nur auf Änderungen der Reglerabweichung zu reagieren und je nach D-Faktor auch sehr stark. D-Regler eignen sich daher sehr gut um schnell zu reagieren, bergen aber die Gefahr dass auch überreagiert wird. D-Regler werden daher praktisch nie alleine, sondern nur in Kombination mit anderen (P-, oder I-) Reglern eingesetzt.
Wenn wir nun die 3 unterschiddlichen Regler-Typen (P-, I- und D-Regler) kombinieren, bekommen wir Regler, mit gemischten Eigenschaften der Grund-Typen. In der Praxis werden daher sehr oft diese Kombinationen eingesetzt, um die gewünschte Eigenschaft zu erhalten. Der PI-Regler, ist eine Kombination aus P-Regler und I-Regler. Er berücksichtigt beide Funktionen. Beide Grundfunktionen haben auch hier die Reglerabweichung als maßgebliches Element für die Berechnung der Regelgröße. Man kann auch beide Funktionen getrennt betrachten und die beiden Regelgrößen dann addieren. Wichtig dabei ist aber, dass bei beiden Funktionen die selbe Reglerabweichung als Basis dient und nicht das Ergebnis der einen Funktion als Basis für die zweite Funktion.
Der PI-Regler, ist eine Kombination aus P-Regler und I-Regler. Er berücksichtigt beide Funktionen. Beide Grundfunktionen haben auch hier die Reglerabweichung als maßgebliches Element für die Berechnung der Regelgröße. Man kann auch beide Funktionen getrennt betrachten und die beiden Regelgrößen dann addieren. Wichtig dabei ist aber, dass bei beiden Funktionen die selbe Reglerabweichung als Basis dient und nicht das Ergebnis der einen Funktion als Basis für die zweite Funktion.
Y = ((W-X) * P-Anteil) + ((W-X) * t * I-Anteil)
Solche Regler eignen sich vor allem für Regelungen, die den Sollwert möglicht genau erreichen sollen, da der Reglerausgang aufgrund einer auch noch so kleinen Reglerabweichung ständig nachregelt, bis die Reglerabweichung tatsächlich Null wird. Mit Hilfe des P-Anteiles kann kann auch eine große Reglerabweichung schnell auf die Stellgröße einwirken. Das Wichtigste bei einem PI-Regler ist, dass die beiden Werte (P-Anteil und I-Anteil) gut die Eigenschaft der Regelstrecke abgestimmt sind. Zu hohe Werte können hier auch eine Überreaktion erzeugen.

 Der PID-Regler, ist die Kombination aus allen 3 Regler-Typen. Mit diesem Regler-Typ können wir auf alle Funktionen (Eigenschaften) einer Regelstrecke reagieren. Natürlich ist auch hier für alle 3 Einzelfunktionen die aktuelle Reglerabweichung die Basis für die Regelgröße. Da beim PI-Regler schon eine relativ genaue Regelgröße erreicht werden kann, und zumindest nach einiger Zeit die Regelabeichung zu Null wird, kann mit dem zusätzlichen D-Anteil auch noch auf schnelle Ereignisse jeglicher Art, egal ob Sollwertänderung, oder einer Störgröße, die auf die Regelstrecke einwirkt, reagiert werden. Auch hier ist die Regelgröße (Stellgröße) die Summe der einzelnen unabhängigen Regleranteile.
Der PID-Regler, ist die Kombination aus allen 3 Regler-Typen. Mit diesem Regler-Typ können wir auf alle Funktionen (Eigenschaften) einer Regelstrecke reagieren. Natürlich ist auch hier für alle 3 Einzelfunktionen die aktuelle Reglerabweichung die Basis für die Regelgröße. Da beim PI-Regler schon eine relativ genaue Regelgröße erreicht werden kann, und zumindest nach einiger Zeit die Regelabeichung zu Null wird, kann mit dem zusätzlichen D-Anteil auch noch auf schnelle Ereignisse jeglicher Art, egal ob Sollwertänderung, oder einer Störgröße, die auf die Regelstrecke einwirkt, reagiert werden. Auch hier ist die Regelgröße (Stellgröße) die Summe der einzelnen unabhängigen Regleranteile.
Y = ((W-X) * P-Anteil) + ((W-X) * t * I-Anteil) + (![]() (W-X) * t * D-Anteil)
(W-X) * t * D-Anteil)
Mit dem PID-Regler kann man auf alle Einflüße die auf eine Regelstrecke einwirken entsprechnd reagieren. Natürlich ist auf eine genaue Abwägung der einzelnen (P-, I- und D-) Anteile zu achten. In der Praxis reagieren Regler natürlich nicht ganz so eckig wie in den Sprungantwort-diagrammen dargestellt, sondern ertwas abgerundet, wie rechts ersichtlich. Aber die eigentlichen Grundfunktionen sind trotzdem deutlich erkennbar. Manchmal ist eine geringe Überreaktion (Überschwingen) ganz sinnvoll, um ein genaues Regelergebnis (Sollwertabweichung = Null) gut und schnell zu erreichen.
Regelstrecke
Wenn wir einen physikalischen Wert regeln wollen, so müßen wir wissen, wo sich dieser befindet und wie wir ihn beeinflußen können. Wenn wir bei unserem Beispiel, einer Raumtemperaturregelung bleiben, dann ist das Ziel die Raumtemperatur auf einen gewünschten Wert zu bringen und dort zu halten. Die Raumtemperatur befindet sich ja im Raum, genauer gesagt, ist es die Temperatur der Luft in diesem Raum. Um diese zu beeinflussen müssen wir die Luft entweder erhitzen oder kühlen. Wenn wir nun Einschränkungen oder Rahmenbedingungen festlegen, so müssen wir enige Eigenschaften ignorieren. In unserem Beispiel einer Raumheizung legen wir also folgendes fest:
1. Wir wollen mehr oder weniger nur heizen, nicht kühlen.
2. Wir berücksichtigen die Feuchtigkeit im Raum nicht.
3. Wir gehen davon aus, dass die Aussentemperatur niedriger ist als die gewünschte Raumtemperatur, also Heizbetrieb.
4. Wir betrachten den Raum als geschlossen (getrennt von anderen Räumen).
5. Wir haben genügend Heizmedium (warmes Wasser in unserem Heizungsnetz), sowohl in der Menge, als auch im Temperaturniveau (deutlich höher als unser Sollwert) verfügbar.
6. Wir haben ein Hilfsmittel, mit dem wir die Wärmeenergie in den Raum übertragen können (Wärmetauscher = Heizkörper)
7. Wir haben keine nennenswerten Elemente im Raum, die über die Raumluft zusätzlich mit beeinflusst werden müssen (Wärmespeicher in Form von größen Massen)
Es sind also viele Voraussetzungen, die wir zur Bestimmung einer Regelstrecke voraussetzen müssen, um überhaupt die Funktion vernünfig betrachten zu können. Wir nennen die Voraussetzungen, die Rahmenbedingungen. Nur unter definierten Rahmenbedingungen können wir eine Reglstrecke überhaupt betrachten, beurteilen oder berechnen.
 Jetzt müssen wir noch eine Möglichkeit schaffen, um dem Wert, den wir beeinflussen wollen (Temperatur) zu erfassen (messen). Dies erfolgt mit einem Sensor, hier ein Temperaturfühler.
Jetzt müssen wir noch eine Möglichkeit schaffen, um dem Wert, den wir beeinflussen wollen (Temperatur) zu erfassen (messen). Dies erfolgt mit einem Sensor, hier ein Temperaturfühler.
Natürlich brauchen wir auch die Möglichkeit die Wärmemenge, die wir dem Raum zuführen gezielt zu beeinflussen. Dies erfolgt mit einem Stellglied, hier ein Ventil, das mehr oder weniger Heiz-Wasser in den Heizkörper durchlässt.
Sowohl der Sensor (Temperaturfühler), als auch das Stellglied (Ventil) sind eigentlich keine Elemente der Regelstrecke, sondern nur Hilfsmittel zur Umsetzung der physikalischen Größen.
Zur Regelstrecke selbst gehören hier, die Luftmenge im Raum und der Heizkörper.
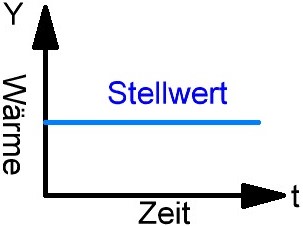
") Wenn wir jetzt die Eigenschaft unserer Regelstrecke definieren wollen, so müssen wir ihre Elemte und deren Eigenschaften bezogen auf das Medium und den Messwert kennen. Wenn wir der Einfachheit halber mal annehmen, dass der Heizkörper sofort die Wärme in den Raum überträgt, würde die Luft im Raum kontinuierlich erwärmt werden, solange Wärmeenergie eingebracht wird (Stellwert Y = unverändert). Die Sprungantwort der Regelstrecke verhält sich also wie ein I-Regler, bezogen auf Eingangswert Y und Ausgangswert X, zumindest so lange, bis wir an eine physikalische Grenze stoßen, also so lange wir innerhalb der Regelparameter bleiben.
Wenn wir jetzt die Eigenschaft unserer Regelstrecke definieren wollen, so müssen wir ihre Elemte und deren Eigenschaften bezogen auf das Medium und den Messwert kennen. Wenn wir der Einfachheit halber mal annehmen, dass der Heizkörper sofort die Wärme in den Raum überträgt, würde die Luft im Raum kontinuierlich erwärmt werden, solange Wärmeenergie eingebracht wird (Stellwert Y = unverändert). Die Sprungantwort der Regelstrecke verhält sich also wie ein I-Regler, bezogen auf Eingangswert Y und Ausgangswert X, zumindest so lange, bis wir an eine physikalische Grenze stoßen, also so lange wir innerhalb der Regelparameter bleiben.
Es ist hier zu erkennen, dass der Istwert ständig ansteigt, solange wir Wärmeenergie in den Raum einbringen. Genau diesem Effekt, wollen wir ja mit dem Regler entgegen wirken.  Wir dürfen bei der Regelstrecke aber einen wichtigen Faktor nicht unterschätzen, die Störgröße. Das sind alle Einflüße, die auf die Regelstrecke (hier auf den Raum) einwirken und den theoretischen Verlauf des Istwertes (die Raumtemperatur) beeinflussen. Es können mehrere Störgrößen in unterschiedlicher Weise auf die Regelstrecke wirken. Der Effekt des Wärmeverlustes nach aussen, ist am markantesten, denn wenn es draussen kühler ist, als im Raum, wird über Wände, Undichtigkeiten usw. immer etwas Wärme abfliessen. Das bedeutet dass der Istwert etwas langsamer ansteigt, je nach Wärmemenge, die nach aussen dringt. Im Extrem-Fall könnte sogar der Wärmeverlust größer sein, als das Stellglied (Ventil) Wärmeenergie einbringen kann. In diesem Fall würden wir ausserhalb der Regelparameter liegen, denn wir könnten den Istwert (Temperatur) dann gar nicht halten. In diesem Fall würde die Rahmenbedingung "5" nicht mehr zutreffen.
Wir dürfen bei der Regelstrecke aber einen wichtigen Faktor nicht unterschätzen, die Störgröße. Das sind alle Einflüße, die auf die Regelstrecke (hier auf den Raum) einwirken und den theoretischen Verlauf des Istwertes (die Raumtemperatur) beeinflussen. Es können mehrere Störgrößen in unterschiedlicher Weise auf die Regelstrecke wirken. Der Effekt des Wärmeverlustes nach aussen, ist am markantesten, denn wenn es draussen kühler ist, als im Raum, wird über Wände, Undichtigkeiten usw. immer etwas Wärme abfliessen. Das bedeutet dass der Istwert etwas langsamer ansteigt, je nach Wärmemenge, die nach aussen dringt. Im Extrem-Fall könnte sogar der Wärmeverlust größer sein, als das Stellglied (Ventil) Wärmeenergie einbringen kann. In diesem Fall würden wir ausserhalb der Regelparameter liegen, denn wir könnten den Istwert (Temperatur) dann gar nicht halten. In diesem Fall würde die Rahmenbedingung "5" nicht mehr zutreffen.
Es gibt natürlich auch Störgrößen, die genau das Gegenteil bewirken, z.B. Fremdwärme in der Regelstrecke, z.B. durch elektrische Geräte. Und dann gibt es noch Störgrößen die nur kurzzeitig, aber dennoch stark einwirken, z.B. geöffnete Fenster.
Je mehr Störgrößen auf eine Regelstrecke (hier der Raum) einwirken, desto wichtiger und anspruchsvoller ist eine Regelung mit Hilfe eines Reglers.
Sensoren
Wie schon erwähnt bilden die Sensoren ein wichtiges Glied in der Regeltechnik. Sie dienen dazu den Istwert, also den Wert, den wir letztendlich auch beeinflussen wollen überhaupt zu erfassen. Denn ohne dessen Kentniss können wir gar nicht regeln, es wäre ein totaler "Blindflug", wir hätten maximal eine Steuerung.
Die Sensoren (Messgeräte) sollen den erfassten Wert aber auch so zur Verfügung stellen, dass ein Regler diesen erfassen kann. Natürlich ist es möglich einen Wert auch in unterschidlicher Form verfügbar zu machen, z.B als elektrisches, numerisches oder analoges Signal. Die gebräuchligsten Sensoren für Temperatur sind: temperaturabhänger Widerstand (Bild), Bimetall-Streifen, Microchips, die Impule ausgeben, oder Prozessoren, die direkt Datenpakete zur Verfügung stellen. Gleichgültig welcher Bauart der Sensor ist, er muss den Istwert ständig bereit stellen.
Wir unterscheiden bei Sensoren zwischwen analogen Werten und binären Werten. 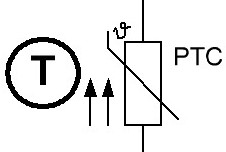 Als analoger Wert betrachten wir, wenn ein Sensor (innerhalb seines Erfassungsbereiches, Messgrenzen) jeden Zwischenwert darstellen und weitergeben kann. Es können daher praktisch alle Werte mehr oder weniger genau erfasst werden. Die Genauigkeit ist lediglich von der Bauart und Präzision des Sensors abhängig. Natürlich gehen wir auch davon aus, dass der Istwert unmittelbar (ohne Verzögerung) erfasst wird.
Als analoger Wert betrachten wir, wenn ein Sensor (innerhalb seines Erfassungsbereiches, Messgrenzen) jeden Zwischenwert darstellen und weitergeben kann. Es können daher praktisch alle Werte mehr oder weniger genau erfasst werden. Die Genauigkeit ist lediglich von der Bauart und Präzision des Sensors abhängig. Natürlich gehen wir auch davon aus, dass der Istwert unmittelbar (ohne Verzögerung) erfasst wird.
 Als binären Sensor bezeichnen wir Messeinrichtungen, die nur 2 Zustände (binär) kennen. Mit solchen Sensoren können wir nur erfassen, wenn ein bestimter physikalischer Wert über, oder unterschritten ist. Genaugenommen sind solche binären Sensoren schon ein eigener Regler, denn sie stellen eine Zustand dar, der die Über-oder Unterschreitung eines festen Wertes darstellt. Also bezogen auf einen Vergleichswert T(0) und genau das macht eigentlich einen Regler aus. Die Ausgabe des Wertes unterliegt dann aber noch einer Hysterese um diesen Vergleichswert. Ein Temperaturbereich (dT) um den Vergleichswert stell die Hysterese dar. Wenn der obere Wert von dt überschritten wird, so schaltet der Schaltzustand auf Ein und wenn der untere Wert von dT unterschritten wird, dann schaltet der Schaltzustand auf Aus. Innerhalb des Bereiches von dT bleibt der Wert unverändert. Ohne diese Hysterese würde der Schsltzustand bei T(0) bei nur geringen Schwankungen der Temperatur sofort umschalten.
Als binären Sensor bezeichnen wir Messeinrichtungen, die nur 2 Zustände (binär) kennen. Mit solchen Sensoren können wir nur erfassen, wenn ein bestimter physikalischer Wert über, oder unterschritten ist. Genaugenommen sind solche binären Sensoren schon ein eigener Regler, denn sie stellen eine Zustand dar, der die Über-oder Unterschreitung eines festen Wertes darstellt. Also bezogen auf einen Vergleichswert T(0) und genau das macht eigentlich einen Regler aus. Die Ausgabe des Wertes unterliegt dann aber noch einer Hysterese um diesen Vergleichswert. Ein Temperaturbereich (dT) um den Vergleichswert stell die Hysterese dar. Wenn der obere Wert von dt überschritten wird, so schaltet der Schaltzustand auf Ein und wenn der untere Wert von dT unterschritten wird, dann schaltet der Schaltzustand auf Aus. Innerhalb des Bereiches von dT bleibt der Wert unverändert. Ohne diese Hysterese würde der Schsltzustand bei T(0) bei nur geringen Schwankungen der Temperatur sofort umschalten.
Stellglieder
Die Stellglieder, also die Verbindung zwischen Regler-Ausgang und Regelstrecken-Eingang können ganz unterschiedlicher Natur sein. Das hängt ganz davon ab, wie wir die Relstrecke beeinflussen wollen bzw. können. Es gibt Stellglieder die kennen einen analogen Wert von 0% bis 100% und binäre Stellglieder die kennen nur Ein und Aus und es gibt Impuls- Stellglieder die kenn nur mehr, oder weniger. 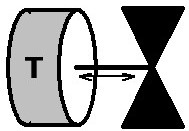 Analoge Stellglieder können jeden Wert zwischen 0 und 100% annehmen, je nach Wert der Stellgröße Y eines Reglerausganges wird ein poropotionales Stellglied die physikalische Größe am Eingang der Reglerstrecke beeinflussen. Beim Beispile des Thermostatventiles ist die der Ausdehnungskörper im Reglelventil, der den Stift im Ventil des Heizkörpers mehr oder weniger betätigt und damit die Durchflußmenge des Mediums (warmes Wasser) beliebig weit öffnen oder schliessen kann.
Analoge Stellglieder können jeden Wert zwischen 0 und 100% annehmen, je nach Wert der Stellgröße Y eines Reglerausganges wird ein poropotionales Stellglied die physikalische Größe am Eingang der Reglerstrecke beeinflussen. Beim Beispile des Thermostatventiles ist die der Ausdehnungskörper im Reglelventil, der den Stift im Ventil des Heizkörpers mehr oder weniger betätigt und damit die Durchflußmenge des Mediums (warmes Wasser) beliebig weit öffnen oder schliessen kann. 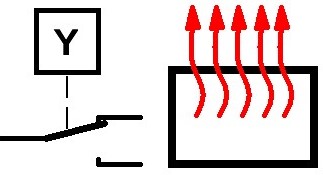 Binäre Stellglieder kennen nur den Zustand Ein und Aus. Der Regler muss daher die berechnete Stellgröße in Form eines binären Zustandes ausgeben. Binäre Stellglieder kennen daher nur 2 Zustände und keinerlei Zwischenwerte. Sie können daher die Regelstrecke nur in eine Richtung beeinflussen. Solche Stellglieder werden dort eingesetzt, wo wir wissen, dass auf Grund einer Störgröße der Stellwert mit Sicherheit wieder kleiner wird. Ein Beispile ist ein elektrischer Heizlüfter. Hier ist der Schaltkontakt des eingebauten Reglers das Stellglied und wir wissen, dass die Raumteperatur bei ausgeschaltetem Heizlüfter wieder abkühlt. Natürlich haben wir hier auch eine Hysterese (dT) um den eingestellten Sollwert.
Binäre Stellglieder kennen nur den Zustand Ein und Aus. Der Regler muss daher die berechnete Stellgröße in Form eines binären Zustandes ausgeben. Binäre Stellglieder kennen daher nur 2 Zustände und keinerlei Zwischenwerte. Sie können daher die Regelstrecke nur in eine Richtung beeinflussen. Solche Stellglieder werden dort eingesetzt, wo wir wissen, dass auf Grund einer Störgröße der Stellwert mit Sicherheit wieder kleiner wird. Ein Beispile ist ein elektrischer Heizlüfter. Hier ist der Schaltkontakt des eingebauten Reglers das Stellglied und wir wissen, dass die Raumteperatur bei ausgeschaltetem Heizlüfter wieder abkühlt. Natürlich haben wir hier auch eine Hysterese (dT) um den eingestellten Sollwert.
Impuls Stellglieder, sind Stellglieder die eine gewisse Zeit ein Signal ausgeben, wobei die Dauer des Signales von der Regelabweichung abhängt. Sie dienen dazu das eigentliche Stellelement mit einer festen Geschwindigkeit in eine andere Position zu bringen. Daher dürfen sie nur eine gewisse Zeit aktiv sein, um die gewünschte Verstellung zu erreichen und wir benötigen 2 getrennte Signale, einmal für die Funktion mehr (öffnen) und einmal für die Funktion weniger (schließen). Solche Stellglieder werden dort eingesetzt, wo wir einen mechanischen Gegenstand mit einem Motor bewegen, um das eigentliche Stellglied zu beeinflussen. Sehr oft kommen solche Impuls-Stellglieder bei Ventilen, Mischern oder Klappen vor, wo ein Stößel oder eine Mischklappe mehr oder weniger weit mehr auf- oder zu-gefahren wird.
Regelkreis
Als Regelung bezeichnet man die gezielte Beinflussung von physikalischen Zuständen. Eine Reglung besteht eigentlich aus folgenden Komponenten: Der Regelstrecke, dem Sensor, dem Aktor und dem Regler.  Die Regelstrecke, ist die Komponente, die man eigentlich beeinflussen will, also das eigentlich Ziel einer Regelung. Man will ja eine bestimmte Komponente der Regelstrecke physikalisch beeinflussen, z.B. die Temperatur in einem Raum.
Die Regelstrecke, ist die Komponente, die man eigentlich beeinflussen will, also das eigentlich Ziel einer Regelung. Man will ja eine bestimmte Komponente der Regelstrecke physikalisch beeinflussen, z.B. die Temperatur in einem Raum.
Der Sensor, ist das Element, das den Zustand der zu beeinflussenden Komponente erfasst. Der Sensor erfasst den aktuellen physikalischen Wert und stellt diesen dann dem Regler als Istwert zur Verfügung, z.B. Temperaturfühler.
Der Aktor, ist das Element, z.B. Ventil, das mit Hilfe des Stellwertes aus dem Regler die maßgebende Komponente der Regelstrecke beeinflusst, so dass sich daraus ein anderer Zustand (Istwert) ergibt.
Der Regler, ist das Element, das die physikalischen Zusammenhänge verknüpft und mit Hilfe des Stellwertes den Aktor gezielt ansteuert.
Das Ganze ist eigentlich ein Kreislauf in dem sich Regler und Regelstrecke ständig mit Hilfe des Sensors und des Aktors gegenseitig beeinflussen (aktualisieren). Man spricht daher auch von einem Regelkreis.
In einem Regelkreis gibt es aber auch noch andere Komponenten, die massgeblich sind. Zum einen der Sollwert. Er gibt den gewünschten Wert für den Istwert vor. Die Abweichung zwischen Sollwert und Istwert wird daher auch als Regelabweichung bezeichnet. Mit Hilfe der Regeler-Eigenschaft (Regler-Parameter) wird aus der Reglerabweichung der Stellwert berechnet, der dann über das Stellglied die Regelstrecke beeinflußt. Dann gibt es noch die Störgröße. Das ist ein Einfluss von aussen, auf die Regelstrecke. Die Störgröße verändert den aktuell zu regelnden Wert in der Regelstrecke. Sie sorgt dafür, dasss der Istwert vom Sollwert abweicht, was dann vom Regler wieder durch Gegenmaßnahmen ausgeglichen wird. Und letztlich gibt es noch die Hilfsgröße, die dierekt auf den Regler einwirkt und evtl. dessen Parameter verändert. Dies könnte z.B. eine Zeitsteuerung oder ein anderer Wert sein, wie die Änderung der Aussentemperatur.
Regelfunktion
Betrachten wir die Regelung mal genauer, so müssen wir zwischen Regler und Regelstrecke unterscheiden.
Die Regelstrecke, ist das eigentliche Element, das wir beeinflussen wollen. Bei einer Raumtemperatur-Regelung ist die Temperatur in dem Raum die Komponente, die wir Regeln (z.B. konstant halten) wollen. Die Regelstrecke beinhaltet daher alle Elemente, die die Regelgröße, hier die Temperatur beeinflussen. In diesem Fall, den Heizkörper und die Luft im Raum. Die Regelgröße ist hier die Temperatur im Raum.
Der Regler, ist das Element, mit dem wir einen Einfluß auf die Regelstrecke nehmen, da wir die Regelstrecke selbst ja nicht verändern können und als gegeben voraussetzen müßen.
Um mit dem Regler überhaupt einen Einfluss nehme zu können, benötigen wir Hilfsmittel. Zum Einen einen Sensor, also ein Mess-Element, das uns den aktuellen Zustand der Regelgröße, also hier die Temperatur im Raum, ermittelt und zur Verfügung stellt und zum Anderen ein Stellglied, mit dessen Hilfe wir Einfluß auf die Regelstrecke nehmen können. Hier also ein Ventil, womit wir die Wärmeenergie-Menge, die wir in den Raum einbringen verändern können.
Zunächst müßen wir die Eigenschaft der Regelstrecke kennen, um überhaupt Einfluß auf die Regelgröße nehmen zu können.
Um die Raumtemperatur zu erhöhen, können müßen wir Wärmeenegie dem Raum zuführen. Wenn wir warmes Wasser durch einen Heizkörper leiten, wird dieser erhitzt und gibt über seine Oberfläche die Wärme an den Raum ab. Wir haben aber 2 Möglichkeiten die Wärmemenge zu erhöhen. Entweder wir machen das Wasser das zugeführt wird wärmer, oder wir erhöhen die Menge des warmen Wassers. Die Temperaturerhöhung des Wassers kommt nur in eienem bestimten Bereich in Frage, da wir das Wasser nicht verdampfen wollen und den Heizkörper nicht so heiß werden lassen können, damit Verbrennungsgefahr besteht, andererseits benötigen wir eine bestimte Temperatur am Heizkörper, damit dieser überhaupt den Raum erwärmen kann. Es kommen daher nur Temperaturen zwischen 30°C und 80°C in Frage. Wir können aber auch die Durchflußmenge des Warmen Wassers erhöhen. Das können wir mit einem Ventil, das den Durchfluss und damit die Wassemenge pro Zeiteinheit verändern kann. Die Durchflußmenge ist also Äquivalent der Wärmemenge die wir in den Raum einbringen wollen.
Wenn wir jetzt eine idealen Raum (Regelstrecke) hätten, dann müßten wir nur so viel Energie einbringen, damit die gewünschte Temperatur im Raum erreichen und dann würde alles unverändert (konstant) bleiben, keine weitere Energiezufuhr mehr (Stellwert = Null). Trotz aller Gebäudeoptimierung werden wir aber immer einen Wärmeabfluß nach Aussen haben, also einen Einfluß, der den Idealfall stört. Wir nennen diese Größe daher auch Störgröße. Ein Raum (Regelstrecke) kann auch mehrere Störgrößen haben, z.B. die Wärmedurchlässigkeit der Wände, geöffnete Fenster oder Türen, Fremdwärme, durch elektrische Geräte, Luftabzug mit Nachströmung aus kälteren Zonen usw.
Wenn wir nun mit Hilfe eines Reglers die Regelstrecke beeinflußen wollen, muss der Regler solche Eigenschaften haben, die möglichst allen Störgrößen entgegenwirken. Sowohl langamen und geringen Störgrößen, wie Wärmeverlust über Wände, als auch große Störgrössen, wie offene Fenster oder Türen, und das möglichst schnell und möglichst genau. 
 Wir müßen daher dem Regler entsprechende Eigenschaften (Regelparameter) geben.
Wir müßen daher dem Regler entsprechende Eigenschaften (Regelparameter) geben.
Wenn der Istwert ohne weitere Veränderung immer weiter vom Sollwert abweichen würde, dann müssen wir durch ständigers Zuführen von Energie diesem entgegen wirken. Das bedeutet, dass wir kontinuierlich über den Stellwert nachführen müssen, um dies auszugleichen. Das Ganze hat aber den Nachteil, dass nur dann ein Stellwert entsteht, wenn der Istwert vom Sollwert tatsächlich abweicht. Was zur Folge hat, dass die Nachführung des Stellwertes geringer wird, je näher der Sollwert und Istwert sich kommen. Anders ausgedrückt, der Stellwert ist propotional der Reglerabweichung. Wir sprechen daher auch von einem Proportional-Regler. Damit würden wir mit der Zeit der Reglerabweichung entgegen wirken, sie aber nie ganz ausgleichen, denn ohne Reglerabweichung auch kein Stellsignal und somit eine geringe, aber kontinuierliche Regelabweichung.